

Anwendung
★ Hochgeschwindigkeitszugmaß und -Kontrollsystem ★ stabile Plattform
★ Marinesoldat und Unterwasservermessungswesen ★ Vermessungswesen Positions-System
★ Schiffs- und Meerestechnik ★ Fahrzeugpositionierung und -navigation
★ UAV-Navigation und Steuer-★ Mobilkommunikationskommunikationssystem
★ Fahrzeugnavigation und Maß und Kontrollsystem
Die Reihe IMU560 wird als Fahrzeug/allgemeines Trägheits- und integriertes Navigationsdecklandeprodukt in Position gebracht
Zielmarkt:
(1) durch bewegend
(2) Autonavigation
(3) dynamische Einstellungsmessung
Spezifikationen
| IMU560 | PARAMETER | EINHEIT | |
| Rolle/Neigung 1σ (Dynamik) | 0,3 | ° | |
| ÜBERSCHRIFT VON POSITIONS-SCHÄTZUNGS-GENAUIGKEIT | Überschrift der Genauigkeit 1σ | 0,3 ° (GPS effektiv) | ° |
| 0.5° (GPSunlock 5min) | ° | ||
|
Reine Trägheitsposition Schätzungs-Genauigkeit 1σ |
<40m> | m@1min | |
| Ausgangsfrequenz | 1~100 | Hz | |
| KREISELKOMPASS | Strecke | ±300 | °/s |
| Null schräge Instabilität (Allan) | 10 | °/h | |
| Null schräge Stabilität (Durchschnitt 10s) | 15 | °/h | |
| Null schräge Wiederholbarkeit | 15 | °/h | |
| Nichtlinearer Fehler | <0> | ||
| Normierungsfaktor Nonlinearity1 | <0> | % | |
| Normierungsfaktor-Änderung (25 ° C) | ±0.3 | % | |
| Entschließung | <0.01 | °/s | |
| Beschleunigungs-Empfindlichkeit | <0> | °/s/g, Effektivwert | |
| Winkel-Irrfahrt | <0> | °/√hr | |
| Geräusch-Intensität | 0,014 | °/s/√hr | |
| Bandbreite | 100 | Hz | |
| BESCHLEUNIGUNGSMESSER | Strecke | ±4 | g |
| Null schräge Stabilität | 0,2 | Magnesium | |
| Volle Temperatur-nullneigung | 1,7 | Magnesium | |
| Normierungsfaktor-Stabilität | <0.1 | % | |
| Entschließung | 0,1 | Magnesium | |
| Nichtlineare 2 | 0,1 | % | |
| Geräusch-Intensität | 200 | ug/√hr | |
| Bandbreite | 100 | Hz | |
| MAGNETOMETER | Strecke | ±2 | Gauß |
| MAGNETISCHER AZIMUT | Strecke | ±180 | ° |
| Genauigkeit | ±1.0 | ° | |
| Luftdruck | Druckstrecke | 1000~120000 | |
| Barometrischer Fehler | ±250 | Pascal | |
| STANDARD-GPS-PARAMETER | Anlasszeit | Kaltstart: Heißstart 29s: 1s | |
| Empfindlichkeit | -166dBm | ||
| Geschwindigkeit | 0.05m/s | ||
| Azimut-Genauigkeit | 0.3°, P=50%@30m/s | ||
| Niveau berechnete Genauigkeit | 2m | ||
| KLIMAeigenschaften | Erschütterung beständig | 10grms, 10~1000Hz | |
| Schlagzähigkeit | 100g@11ms, axiale Richtung 3 (Hälfte Sinusoid) | ||
| Strecke des Arbeitstemp. | -40°C~+85°C | ||
| ELEKTRISCHE SCHNITTSTELLE | Eingangsstrom | <100mA | |
| Eingangsspannung | 9-36V (Kräuselung 50mV) | ||
| Schnittstellen-Art | J30J-9ZKP | ||
| KOMPATIBLER SATELLITENmodus | GPS L1C/A, SBAS L1C/A, GLONASS L1OF, BEIDOU B1 | ||
| GEWICHT | ≤100g (ausschließlich der Kabel) | ||
![]()
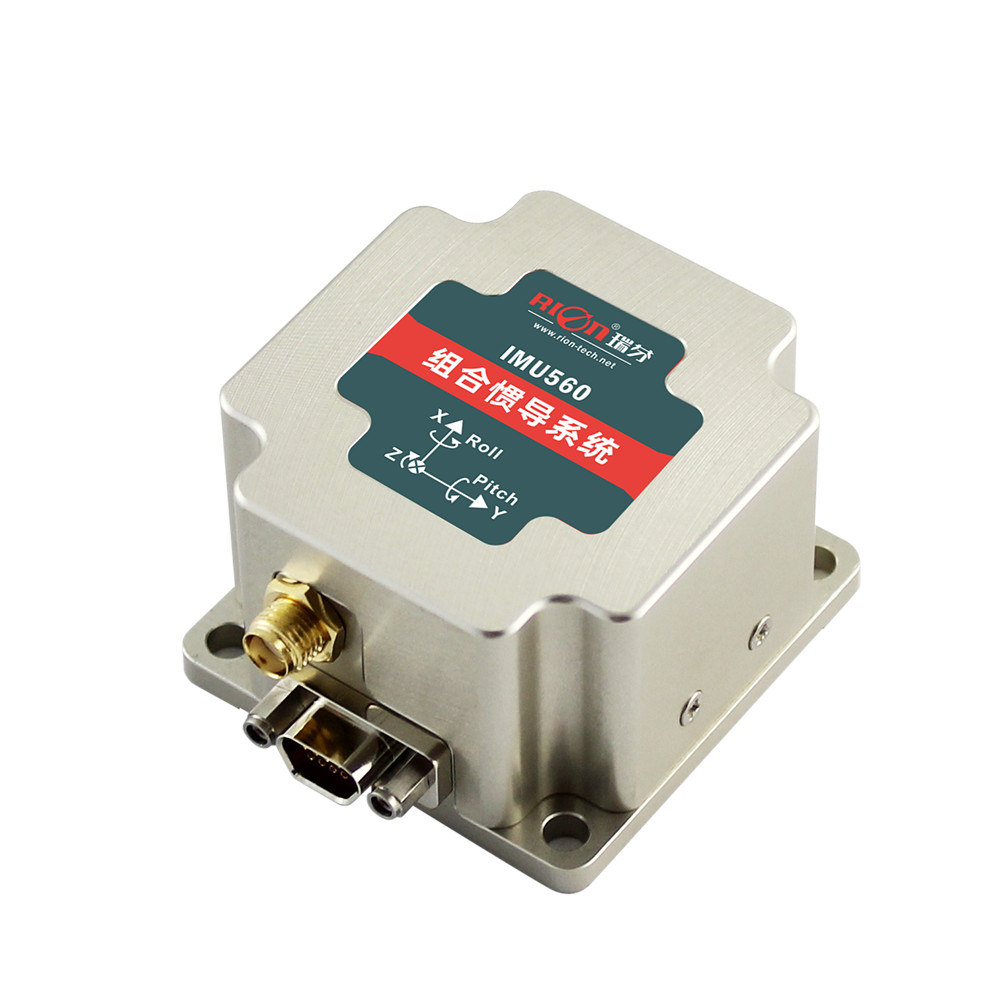
IMU560 verwenden NED-Koordinate, rechte Koordinate, Achsenrichtung oben.
Durch die Rotationsrichtung Z-Y-X, wenn ist Vorwärtspunkt der richtung X zur Front der Fördermaschine, dann des Winkels, der z-Achse dreht, Gierung, y-Achsenneigung, x-Achsenrolle.











