

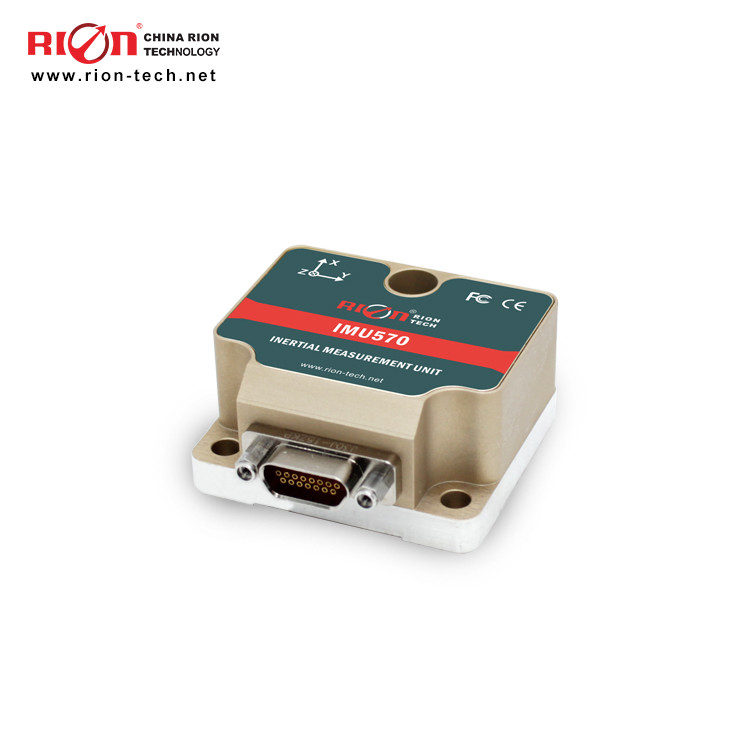


Wird Einheit der Trägheitsnavigation IMU570 aus dreiachsigem Gyroskop, dreiachsiger Beschleunigung, Temperaturfühler und Signalaufbereitungsstromkreis verfasst. Die dreiachsige Winkelgeschwindigkeit der Fördermaschine wird und die drei Winkelgeschwindigkeitsdaten gemessen, nachdem Fehlerausgleich (einschließlich Temperaturausgleich, Installationsversetzungsausgleich, nichtlinearer Ausgleich, etc.) Ertrag durch serielle Schnittstelle RS422 entsprechend dem vereinbarten Übertragungsprotokoll sind. Das Produkt nimmt differenziale Gyroskopstruktur an, hält effektiv den Einfluss der Beschleunigung und der Erschütterung zurück und nimmt vollen Temperaturausgleich an, um der rauen Umwelt der industriellen Anwendung zu entsprechen.
Eigenschaft
dreiachsige Winkelgeschwindigkeit ★ Maßes der Fördermaschine ★ Betriebstemperatur: - 40~85℃
★ Lagertemperatur: - 40~85℃ ★ Erschütterung: 10~2000Hz, 10g
★ Stromversorgung: +5±0.5V (DC) ★ Auswirkung: 100g@11ms, dreiachsig (Hälfte sinusförmig)
Fahrzeug ★ automatischer Kurssteuerung ★ unbemanntes Luftfahrzeug ★AGV
★ SOTM Haltungseinheit ★ Positions-System für Vermessungswesen
★ Schiff und Marine Engineering ★ Ozean und Unterwasservermessungswesen
★ Flug-Kontrollsystem ★ Hochgeschwindigkeitszug-Maß und Kontrollsystem
|
IMU570
|
|
|
Parameter
|
|
||||
|
KREISELKOMPASS
|
|
|
|
|
||||
|
Messbereich
|
|
|
1800°/s
|
|
||||
|
Null schräge Instabilität (@Allan Abweichung)
|
|
|
≤8°/h (- ℃ 20~70)
|
|
||||
|
Irrfahrt des Winkels (@Allan Abweichung)
|
|
|
≤0.13°/√h u. 0.24°/√h
|
|
||||
|
Null schräge Beschleunigungs-Empfindlichkeit
|
|
|
≤1°/h/g
|
|
||||
|
Entschließung
|
|
|
≤0.001°/s
|
|
||||
|
Normierungsfaktornichtlinearität
|
|
|
≤100ppm
|
|
||||
|
Normierungsfaktorwiederholbarkeit
|
|
|
≤100ppm
|
|
||||
|
Kreuzkupplung
|
|
|
≤0.1%
|
|
||||
|
Bandbreite
|
|
|
≥200Hz
|
|
||||
|
Beschleunigungsmesser
|
|
|
|
|
||||
|
Messbereich
|
|
|
±38g
|
|
||||
|
Null schräge Instabilität (@Allan Abweichung)
|
|
|
0.019mg
|
|
||||
|
Null schräge Wiederholbarkeit
|
|
|
0.08mg
|
|
||||
|
Irrfahrt der Geschwindigkeit (@Allan Abweichung)
|
|
|
0.04m/s/√h
|
|
||||
|
Null schräger Fehler in der vollen Temperaturspanne
|
|
|
0.5mg
|
|
||||
|
Gewicht
|
|
|
(52±5) g
|
|
||||
|
Andere Parameter
|
|
|
|
|
||||
|
Stromversorgungsspannung
|
|
|
(+5±0.5) V (DC)
|
|
||||
|
Stromversorgung gegenwärtig
|
|
|
Arbeits-current<0.3A
|
|
||||
|
Betriebstemperatur
|
|
|
-40~85℃
|
|
||||
|
Lagertemperatur
|
|
|
-40~85℃
|
|
||||
|
Erschütterung
|
|
|
10~2000Hz, 10g
|
|
||||
|
Auswirkung
|
|
|
100g@11ms, dreiachsig (Hälfte sinusförmig))
|
|
||||
|
|
|
|
|
|
||||
Anmerkung:
integrierte Trägheitsnavigationsanlage hat nicht diese Konfiguration und braucht verschoben zu werden.
Externe Triggerquellen müssen entsprechend Anforderungen besonders konfiguriert sein. Die Nichterfüllung IMU integrierte Trägheitsnavigationsanlage hat nicht diese Konfiguration und braucht verschoben zu werden.
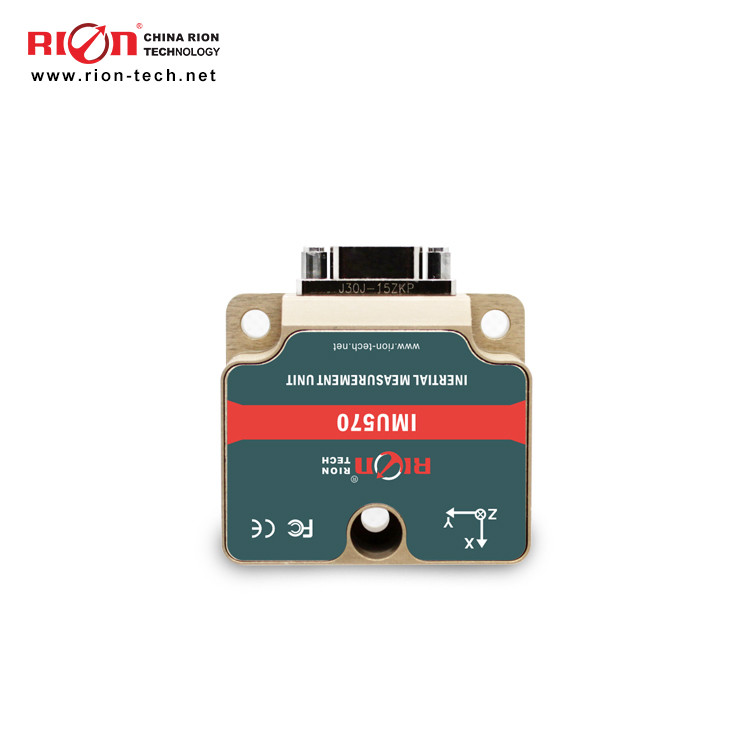
IMU570 enthält drei DOF-Gyroskope und stellt drei Äxte räumliches Koordinatensystem, nämlich X, Y und Z. dar. Das Positiv der Achse X wird vorwärts vom Verbindungsstück auf das mittlere Entlüftungsloch des Aufklebers verwiesen, ist das y-Achsenpositiv zum IMU verwiesenes rechtes, und das z-Achsenpositiv wird abwärts auf die Unterseite des IMU, wie in Abbildung 1. gezeigt verwiesen











